4 Matrices and Linear Maps
4.1 Introduction
4.1.1 Definitions
Definition 4.1 A linear map or linear transformation is a function \[\begin{align*} T : V \to W \end{align*}\] between vector spaces \(V\ (\dim n)\) and \(W\ (\dim m)\) such that \[\begin{align*} T(\lambda \underline{x} + \mu \underline{y}) &= \lambda T(\underline{x}) + \mu T(\underline{y}) \\ \forall \; \underline{x}, \underline{y} \in V \\ \forall \; \lambda, \mu \in \mathbb{R} \text{ or } \mathbb{C} \end{align*}\] for \(V, W\) both real or complex vector spaces.6
Note: a linear map is completely determined by its action on a basis \(\{ \underline{e}_1, \dots, \underline{e}_n \}\) for \(V\), since \[\begin{align*} T\left( \sum_i x_i \underline{e}_i \right) = \sum_i x_i T(\underline{e}_i) \end{align*}\]
\(\underline{x}' = T(\underline{x}) \in W\) is the image of \(\underline{x} \in V\) under T.
\(\operatorname{Im}(T) = \{ \underline{x}' \in W: \underline{x}' = T(\underline{x}) \text{ for some } \underline{x} \in V \}\) is the image of \(T\).
\(\ker(T) = \{ \underline{x} \in V: \underline{x}' = T(\underline{x}) = \underline{0} \}\) is the kernel of \(T\).
Lemma 4.1 \(\ker(T)\) is a subspace of \(V\) and \(\operatorname{Im}(T)\) is a subspace of \(W\).
Proof. \(\underline{x}, \underline{y} \in \ker(T) \implies T(\lambda \underline{x} + \mu \underline{y}) = \lambda T(\underline{x}) + \mu T(\underline{y}) = \underline{0}\) and \(\underline{0} \in \ker(T)\), so results follows.
Also \(\underline{0} \in \operatorname{Im}(T)\) and \(\underline{x}', \underline{y}' \in \operatorname{Im}(T)\) then \(T(\lambda \underline{x} + \mu \underline{y}) = \lambda T(\underline{x}) + \mu T(\underline{y}) = \lambda \underline{x}' + \mu \underline{y}' \in \operatorname{Im}(T)\) for some \(\underline{x}, \underline{y} \in V\).
Example 4.1 Zero linear map \(T : V \to W\) is given by \(T(\underline{x}) = \underline{0} \ \forall \; \underline{x} \in V\). \(\operatorname{Im}(T) = \{ \underline{0} \}\) and \(\ker(T) = V\)
Example 4.2 For \(V = W\), the identity linear map \(T: V \to V\) is given by \(T(\underline{x}) = \underline{x} \; \forall \; x \in V\). \(\operatorname{Im}(T) = V\) and \(\ker(T) = \{ \underline{0} \}\)
Example 4.3 \(V = W = \mathbb{R}^3\), \(\underline{x}' = T(\underline{x})\) given by \[\begin{align*} x_1' &= 3 x_1 + x_2 + 5 x_3 \\ x_2' &= - x_1 - 2 x_3 \\ x_3' &= 2 x_1 + x_2 + 3 x_3 \\ \ker(T) &= \left\{ \lambda \begin{pmatrix}2 \\-1 \\-1\end{pmatrix} \right\} \hspace{0.5cm} (\dim 1) \\ \operatorname{Im}(T) &= \left\{ \lambda \begin{pmatrix}3 \\-1 \\2\end{pmatrix} + \mu \begin{pmatrix}1 \\0 \\1\end{pmatrix} \right\} \hspace{0.5cm} (\dim 2) \end{align*}\]
4.1.2 Rank and Nullity
\(\dim \operatorname{Im}(T)\) is the rank of \(T\) (\(\leq n\)).
\(\dim \ker(T)\) is the nullity of \(T\) (\(\leq n\)).
Theorem 4.1 (rank-nullity) For \(T : V \to W\) a linear map, 4.1 \[\begin{align*} \operatorname{rank}(T) + \operatorname{null}(T) &= n = \dim V \end{align*}\]
Example 4.4 same as those in Definitions
\(\operatorname{rank}(T) + \operatorname{null}(T) = 0 + n = n\)
\(\operatorname{rank}(T) + \operatorname{null}(T) = n + 0 = n\)
\(\operatorname{rank}(T) + \operatorname{null}(T) = 2 + 1 = 3\)
Non-examinable
Proof. Let \(\underline{e}_1, \dots, \underline{e}_k\) be a basis for \(\ker(T)\) so \(T(\underline{e}_i) = 0\) for \(i = 1, \dots, k\).
Extend by \(\underline{e}_{k + 1}, \dots, \underline{e}_n\) to get a basis for \(V\).
Claim
\[\begin{align*}
\mathcal{B} &= \{ T(\underline{e}_{k + 1}), \dots, T(\underline{e}_n) \}
\end{align*}\] is the basis for \(\operatorname{Im}(T)\).
The result then follows since \(\operatorname{null}(T) = k\) and \(\operatorname{rank}(T) = n - k\), implying \(\operatorname{null}(T) + \operatorname{rank}(T) = n\).
To check claim:
\(\mathcal{B}\) spans \(\operatorname{Im}(T)\) since \(\underline{x} = \sum_{i=1}^{n} x_i \underline{e}_i\)
\[\begin{align*}
\implies T(\underline{x}) = \sum_{i=1}^{n} x_i T(\underline{e}_i) = \sum_{i = k + 1}^{n} x_i T(\underline{e}_i)
\end{align*}\]
\(\mathcal{B}\) is linearly independent since
\[\begin{align*}
\sum_{i=k+1}^{n} \lambda_i T(\underline{e}_i) &= \underline{0} \\
\implies T(\sum_{i=k+1}^{n} \lambda_i \underline{e}_i) &= \underline{0} \\
\implies \sum_{i=k+1}^{n} \lambda_i \underline{e}_i &\in \ker(T) \\
\implies \sum_{i=k+1}^{n} \lambda_i \underline{e}_i &= \sum_{i=1}^{k} \mu_i \underline{e}_i
\end{align*}\]
But \(\underline{e}_1, \dots, \underline{e}_n\) are linearly independent in \(V\)
\[\begin{align*}
\implies \lambda_i &= 0 \\
\mu_i &= 0
\end{align*}\]
4.2 Geometrical Examples
4.2.1 Rotations
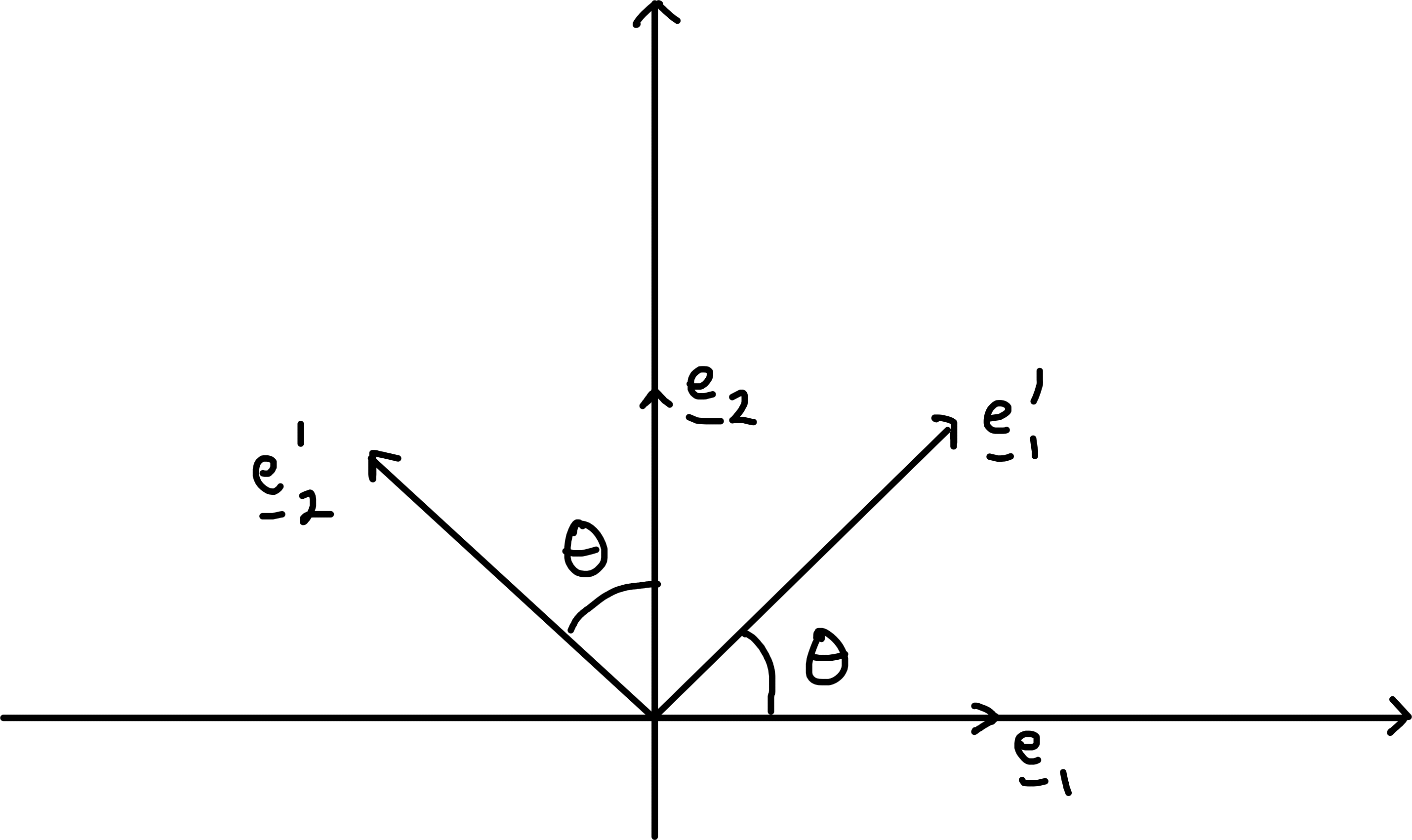
In \(\mathbb{R}^2\), a rotation about \(\underline{0}\) through angle \(\theta\) is defined by \[\begin{align*} \underline{e}_1 &\mapsto \underline{e}_1' = \ \; (\cos \theta) \underline{e}_1 + (\sin \theta) \underline{e}_2 \\ \underline{e}_2 &\mapsto \underline{e}_2' = -(\sin \theta) \underline{e}_1 + (\cos \theta) \underline{e}_2 \end{align*}\]
In \(\mathbb{R}^3\), rotation about axis given by \(\underline{e}_3\) is defined as above, with \[\begin{align*} \underline{e}_3 \mapsto \underline{e}_3' = \underline{e}_3 \end{align*}\]
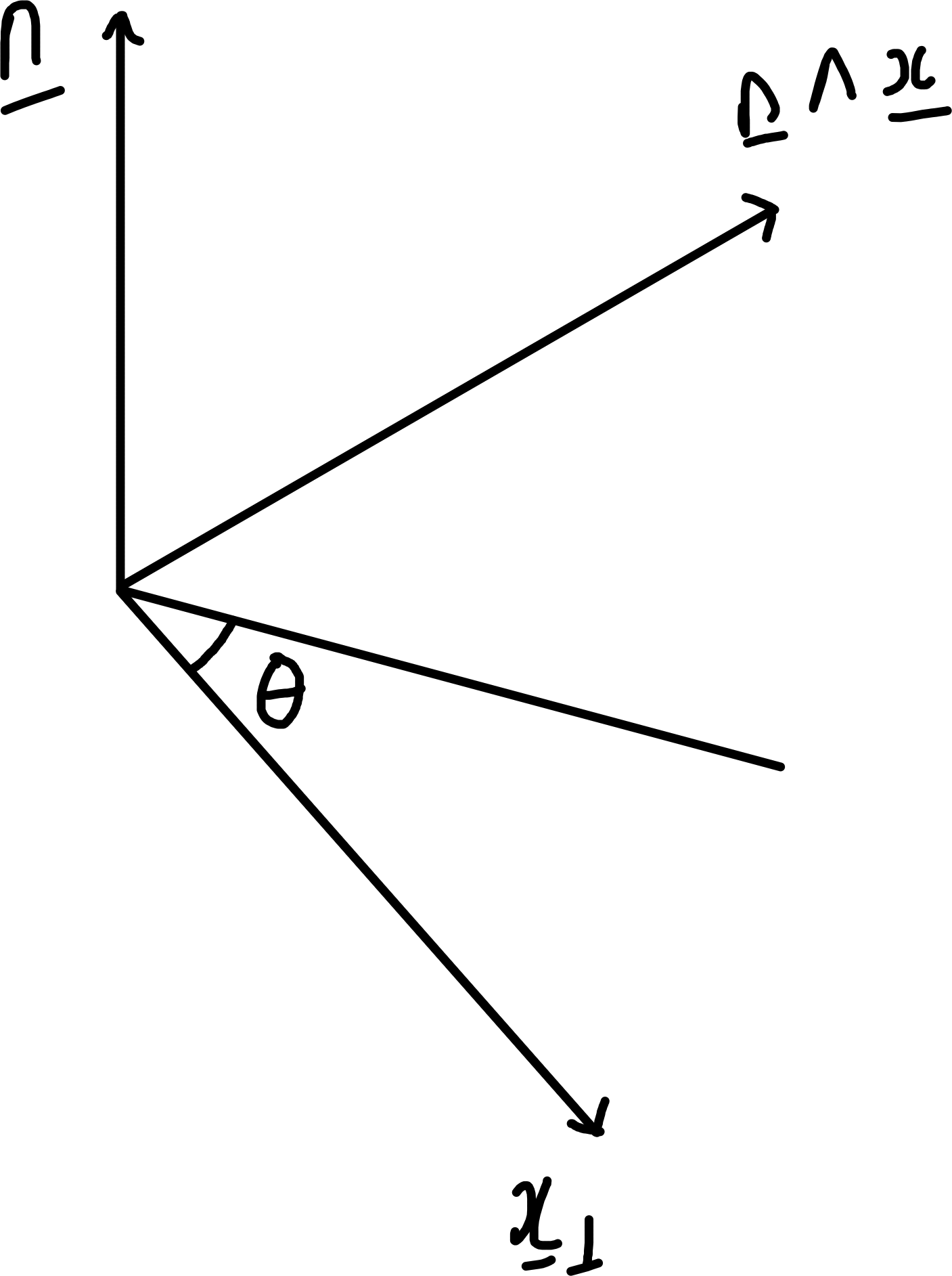
Now consider rotation about any axis \(\underline{n}\) (a unit vector). Given \(\underline{x}\), resolve \(\parallel\) and \(\perp\) to \(\underline{n}\): \[\begin{align*} \underline{x} &= \underline{x}_\parallel + \underline{x}_\perp \hspace{0.5cm} \text{with } \underline{x}_\parallel = (\underline{x} \cdot \underline{n}) \underline{n} \ (\implies \underline{n} \cdot \underline{x}_\perp = \underline{0}) \\ \text{Under rotation} \\ \underline{x}_\parallel &\mapsto \underline{x}_\parallel' = \underline{x}_\parallel \\ \underline{x}_\perp &\mapsto \underline{x}_\perp' = (\cos \theta) \underline{x}_\perp + (\sin \theta) \underline{n} \wedge \underline{x}, \end{align*}\] by considering plane \(\perp \underline{n}\), comparing to rotation in \(\mathbb{R}^2\) and noting that \(|\underline{x}_\perp| = | \underline{n} \wedge \underline{x} |\).
\[\begin{align*} \underline{x} \mapsto \underline{x}' &= \underline{x}_\parallel' + \underline{x}_\perp' \\ &= (\cos \theta) \underline{x} + (1 - \cos \theta) (\underline{n} \cdot \underline{x}) \underline{n} + \sin \theta \underline{n} \wedge \underline{x}. \end{align*}\]
4.2.2 Reflections
Consider a reflection in a plane in \(\mathbb{R}^3\) (or line in \(\mathbb{R}^2\)) through \(\underline{0}\) with unit normal \(\underline{n}\).
Given \(\underline{x}\), resolve \(\parallel\) and \(\perp\) to \(\underline{n}\):
\[\begin{align*}
\underline{x}_\parallel &\mapsto \underline{x}_\parallel' = -\underline{x}_\parallel \\
\underline{x}_\perp &\mapsto \underline{x}_\perp' = \underline{x}_\perp
\end{align*}\]
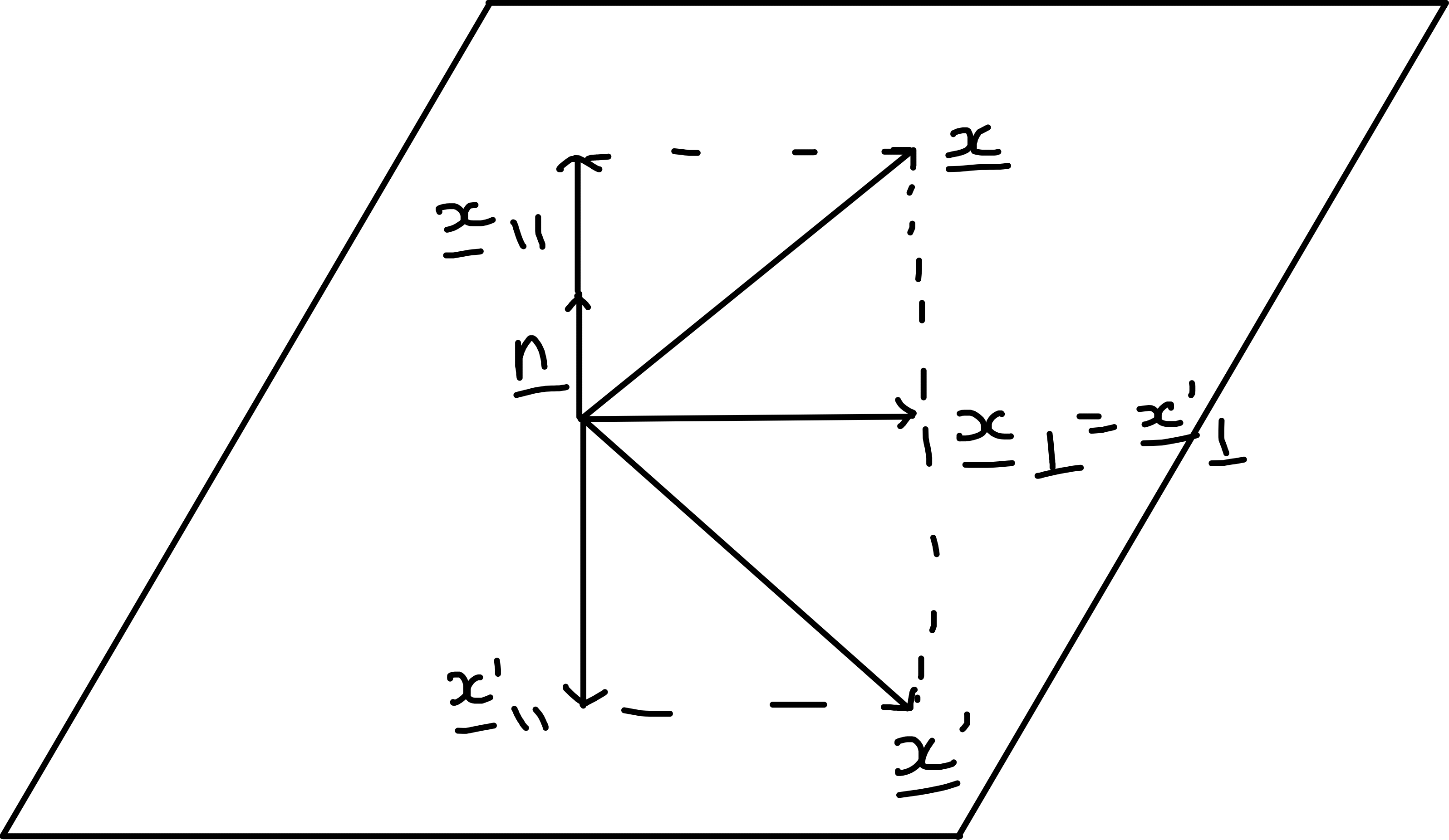
\[\begin{align*} \underline{x} &\mapsto \underline{x}' = \underline{x} - 2 (\underline{x} \cdot \underline{n}) \underline{n} \end{align*}\]
4.2.3 Dilations
A dilation by scale factors \(\alpha, \beta, \gamma\) (real, \(> 0\)) along axes \(\underline{e}_1, \underline{e}_2, \underline{e}_3\) in \(\mathbb{R}^3\) is defined by \[\begin{align*} \underline{x} &= x_1 \underline{e}_1 + x_2 \underline{e}_2 + x_3 \underline{e}_3 \\ \mapsto \underline{x}' &= \alpha x_1 \underline{e}_1 + \beta x_2 \underline{e}_2 + \gamma x_3 \underline{e}_3. \end{align*}\]
A dilation maps a unit cube to a cuboid.
4.2.4 Shears
Given \(\underline{a}, \underline{b}\) orthogonal unit vectors define a shear with parameter \(\lambda\) by \[\begin{align*} \underline{x} &\mapsto \underline{x}' = \underline{x} + \lambda (\underline{x} \cdot \underline{b}) \underline{a} \end{align*}\]
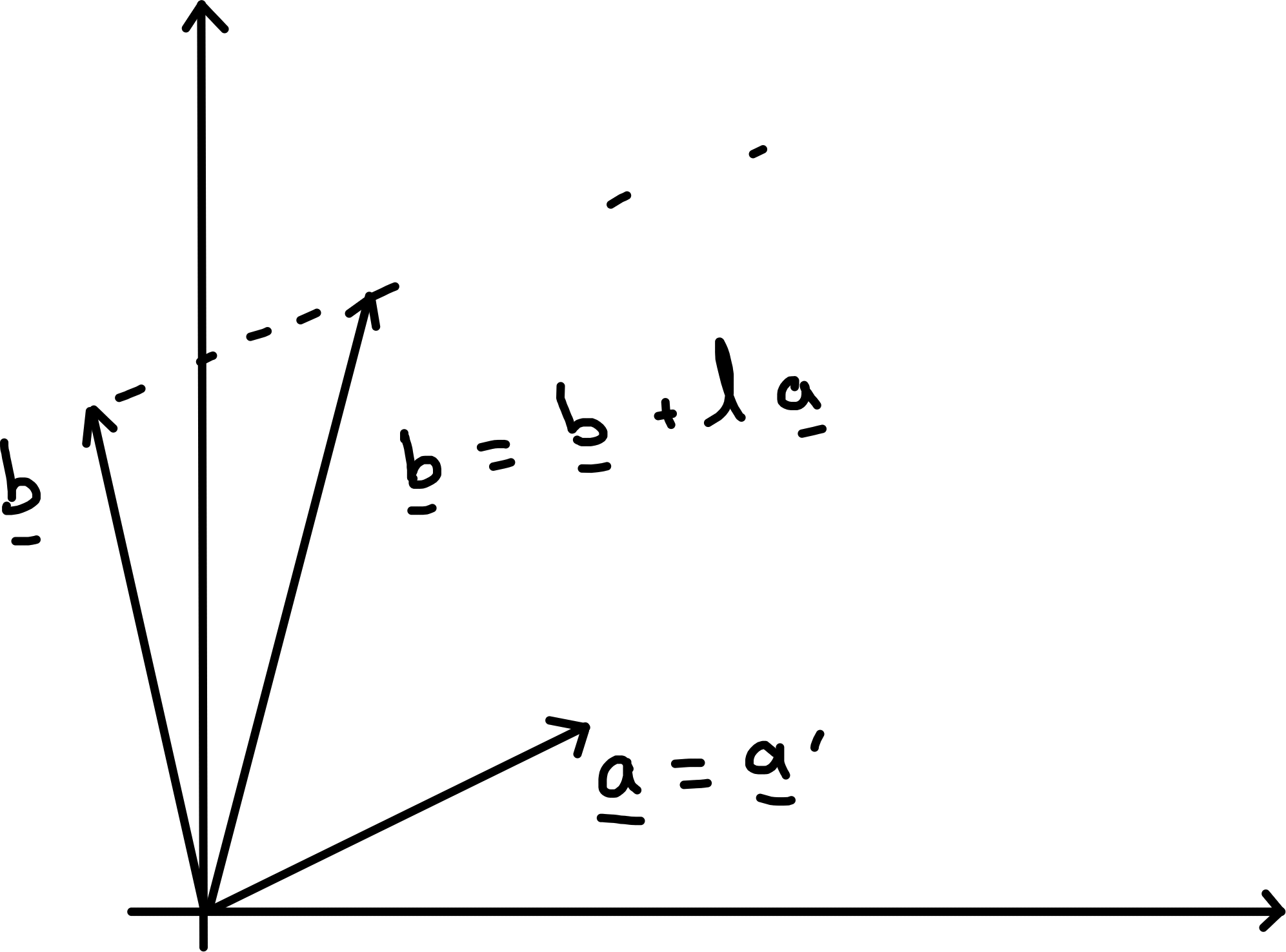
Definition applies in \(\mathbb{R}^n\) and \(\underline{u}' = u\) for any vector \(\underline{u} \perp \underline{b}\).
4.3 Matrices as Linear Maps \(\mathbb{R}^n \to \mathbb{R}^m\)
4.3.1 Definitions
Consider a linear map \(T : \mathbb{R}^n \to \mathbb{R}^m\) and standard bases \(\{ \underline{e}_i \}\) and \(\{ \underline{f}_a \}\) respectively.
Let \(\underline{x}' = T(\underline{x})\) with
\[\begin{align*}
\underline{x} = \sum_i x_i \underline{e}_i = \begin{pmatrix}x_1 \\ \vdots \\ x_n\end{pmatrix},\ \underline{x}' = \sum_a x_a' \underline{f}_a = \begin{pmatrix}x_1' \\ \vdots \\ x_m'\end{pmatrix}
\end{align*}\]
Linearity implies \(T\) is determined by \(T(\underline{e}_i) = \underline{e}_i' = \underline{C}_i \in \mathbb{R}^m \ (i = 1, \dots, n)\); take these as columns of a \(m \times n\) array or matrix \(M\) with rows
\[\begin{align*}
\underline{R}_a \in \mathbb{R}^n \ (a = 1, \dots, m).
\end{align*}\]
\(M\) has entries \(M_{ai} \in \mathbb{R}\) where \(a\) labels rows and \(i\) labels columns.
\[\begin{align*} \begin{pmatrix} \uparrow & & \uparrow \\ \underline{C}_1 & \dots & \underline{C}_n \\ \downarrow & & \downarrow \end{pmatrix} = M = \begin{pmatrix} \leftarrow & \underline{R}_1 & \rightarrow \\ & \vdots & \\ \leftarrow & \underline{R}_m & \rightarrow \end{pmatrix} \end{align*}\]
\((\underline{C}_i)_a = M_{ai} = (\underline{R}_a)_i\).
Action of \(T\) is given by matrix \(M\) multiplying vector \(\underline{x}\),
\(\underline{x}' = M \underline{x}\) defined by \(x_a' = M_{ai} x_i\) (\(\sum\) convention).
This follows from definitions above since \[\begin{align*} \underline{x}' &= T\left( \sum_i x_i \underline{e}_i \right) = \sum_i x_i \underline{C}_i \\ \implies (\underline{x}')_a &= \sum_i x_i (\underline{C}_i)_a \\ &= \sum_i M_{ai} x_i \\ &= \sum_i (\underline{R}_a) x_i \\ &= \underline{R}_a \cdot x \end{align*}\]
Now regard properties of \(T\) as properties of \(M\).
\(\operatorname{Im}(T) = \operatorname{Im}(M) = \operatorname{span} \{ \underline{C}_1, \dots, \underline{C}_n \}\), the image of M (or T) is the span of the columns.
\(\ker(T) = \ker(M) = \{\underline{x} : \underline{R}_a \cdot \underline{x} = 0 \; \forall \; a \}\), kernel of M is subspace \(\perp\) all rows.
4.3.2 Examples
Refer to Examples 4.1, 4.2, 4.3, 4.4.
Example 4.5 Zero map \(\mathbb{R}^n \to \mathbb{R}^m\) corresponds to zero matrix \(M = 0\) with \(M_{ai} = 0\).
Example 4.6 Identity map \(\mathbb{R}^n \to \mathbb{R}^n\) corresponds to identity matrix \[\begin{align*} M = I = \begin{pmatrix} 1 & & & \smash{\huge 0} \\ & 1 & & \\ & & \ddots & \\ \huge 0 & & & 1 \end{pmatrix} \end{align*}\] with \(I_{ij} = \delta_{ij}\).
Example 4.7 \(\mathbb{R}^3 \to \mathbb{R}^3\), \(\underline{x}' = T(\underline{x}) = M \underline{x}\) with \[\begin{align*} M &= \begin{pmatrix} 3 & 1 & 5 \\ -1 & 0 & -2 \\ 2 & 1 & 3 \end{pmatrix}, \underline{C}_1 = \begin{pmatrix}3 \\-1 \\2\end{pmatrix}, \underline{C}_2 = \begin{pmatrix}1 \\0 \\1\end{pmatrix}, \underline{C}_3 = \begin{pmatrix}5 \\-2 \\3\end{pmatrix} \\ \operatorname{T} &= \operatorname{M} \\ &= \operatorname{span} \{ \underline{C}_1, \underline{C}_2, \underline{C}_3 \} \\ &= \operatorname{span} \{ \underline{C}_1, \underline{C}_2 \} \text{ since } \underline{C}_3 = 2 \underline{C}_1 - \underline{C}_2 \\ \underline{R}_1 &= \begin{pmatrix}3 & 1 & 5\end{pmatrix} \\ \underline{R}_2 &= \begin{pmatrix}-1 & 0 & 2\end{pmatrix} \\ \underline{R}_3 &= \begin{pmatrix}2 & 1 & 3\end{pmatrix} \\ \underline{R}_2 \wedge \underline{R}_3 &= \begin{pmatrix}2 & -1 & -1\end{pmatrix} \\ &= \underline{u}, \text{ say } \perp \text{ all rows (in fact)} \\ \ker (T) &= \ker (M) = \{ \lambda \underline{u} \} \end{align*}\]
Example 4.8 Rotation through \(\theta\) about \(\underline{0}\) in \(\mathbb{R}^2\) \[\begin{align*} \underline{e}_1 &= \begin{pmatrix}1 \\0\end{pmatrix} \mapsto \begin{pmatrix} \cos \theta \\ \sin \theta\end{pmatrix} = \underline{C}_1 \\ \underline{e}_2 &= \begin{pmatrix}0 \\1\end{pmatrix} \mapsto \begin{pmatrix}- \sin \theta \\ \cos \theta\end{pmatrix} = \underline{C}_2 \\ \implies M &= \begin{pmatrix} \cos \theta & - \sin \theta \\ \sin \theta & \cos \theta \end{pmatrix}. \end{align*}\]
Example 4.9 Dilation \(\underline{x}' = M \underline{x}\) with scale factors \(\alpha, \beta, \gamma\) along axes in \(\mathbb{R}^3\). \[\begin{align*} M = \begin{pmatrix} \alpha & 0 & 0 \\ 0 & \beta & 0 \\ 0 & 0 & \gamma \end{pmatrix}. \end{align*}\]
Example 4.10 Reflection in plane \(\perp \underline{n}\) (a unit vector). \[\begin{align*} \underline{x}' &= H \underline{x} = \underline{x} - 2 (\underline{x} \cdot \underline{n}) \underline{n} \\ x_i' &= x_i - 2 x_j n_j n_i \\ &= (\delta_{ij} - 2 n_j n_i) x_j \\ H_{ij} &= \delta_{ij} - 2 n_j n_i \\ \text{e.g. } \underline{n} &= \frac{1}{\sqrt{3}} \begin{pmatrix}1 \\1 \\1\end{pmatrix},\ n_i n_j = \frac{1}{3} \quad \forall \; i, j \\ H &= \frac{1}{3} \begin{pmatrix} 1 & -2 & -2 \\ -2 & 1 & -2 \\ -2 & -2 & 1 \end{pmatrix} \end{align*}\]
Example 4.11 Shear \[\begin{align*} \underline{x}' &= S \underline{x} = \underline{x} + \lambda (\underline{b} \cdot \underline{x})\underline{a} \\ x_i' &= S_{ij} x_j \\ \text{with } S_{ij} &= \delta_{ij} + \lambda a_i b_j \end{align*}\] e.g. in \(\mathbb{R}^2\) with \(\underline{a} = \begin{pmatrix}1 \\0\end{pmatrix}\) and \(\underline{b} = \begin{pmatrix}0 \\1\end{pmatrix}\), \[\begin{align*} S = \begin{pmatrix} 1 & \lambda \\ 0 & 1 \end{pmatrix}. \end{align*}\]
Example 4.12 Rotation in \(\mathbb{R}^3\) with axis \(\underline{n}\) and angle \(\theta\), \[\begin{align*} \underline{x}' &= R \underline{x} \hspace{1cm} x_i' = R_{ij} x_j \\ \text{where } R_{ij} &= \delta_{ij} \cos \theta + (1 - \cos \theta) n_i n_j - (\sin \theta) \epsilon_{ijk} n_k \end{align*}\] (see Example Sheet 2).
4.3.3 Isometries, area and determinants in \(\mathbb{R}^2\)
Consider a linear map \(\mathbb{R}^2 \to \mathbb{R}^2\) given by \(2 \times 2\) matrix \(M\): \[\begin{align*} \underline{x} \mapsto \underline{x}' = M \underline{x} \end{align*}\]
- When is \(M\) an isometry, preserving lengths \(|\underline{x}'| = |\underline{x}|\)?
This is equivalent to preserving inner products \(\underline{x}' \cdot \underline{y}' = \underline{x} \cdot \underline{y}\) [since \(\underline{x} \cdot \underline{y} = \frac{1}{2} ( |\underline{x} + \underline{y}|^2 - |\underline{x}|^2 - |\underline{y}|^2)\)].
Necessary conditions are
\[\begin{align*}
M \begin{pmatrix}
1 \\
0
\end{pmatrix} &= \begin{pmatrix}\cos \theta \\\sin \theta\end{pmatrix} \text{ for some $\theta$; most general unit vector in $\mathbb{R}^2$} \\
M \begin{pmatrix}0 \\1\end{pmatrix} &= \pm \begin{pmatrix}- \sin \theta \\ \cos \theta\end{pmatrix} \text{ general unit vector $\perp M (1\ 0)^T$}.
\end{align*}\]
Simple to check that these conditions are also sufficient and have two cases
\[\begin{align*}
M = R = \begin{pmatrix}
\cos \theta & - \sin \theta \\
\sin \theta & \cos \theta
\end{pmatrix},
\end{align*}\] a rotation,
or \[\begin{align*}
M = H = \begin{pmatrix}
\cos \theta & \sin \theta \\
\sin \theta & - \cos \theta
\end{pmatrix},
\end{align*}\] a reflection.
Compare with expression for reflection in 4.10
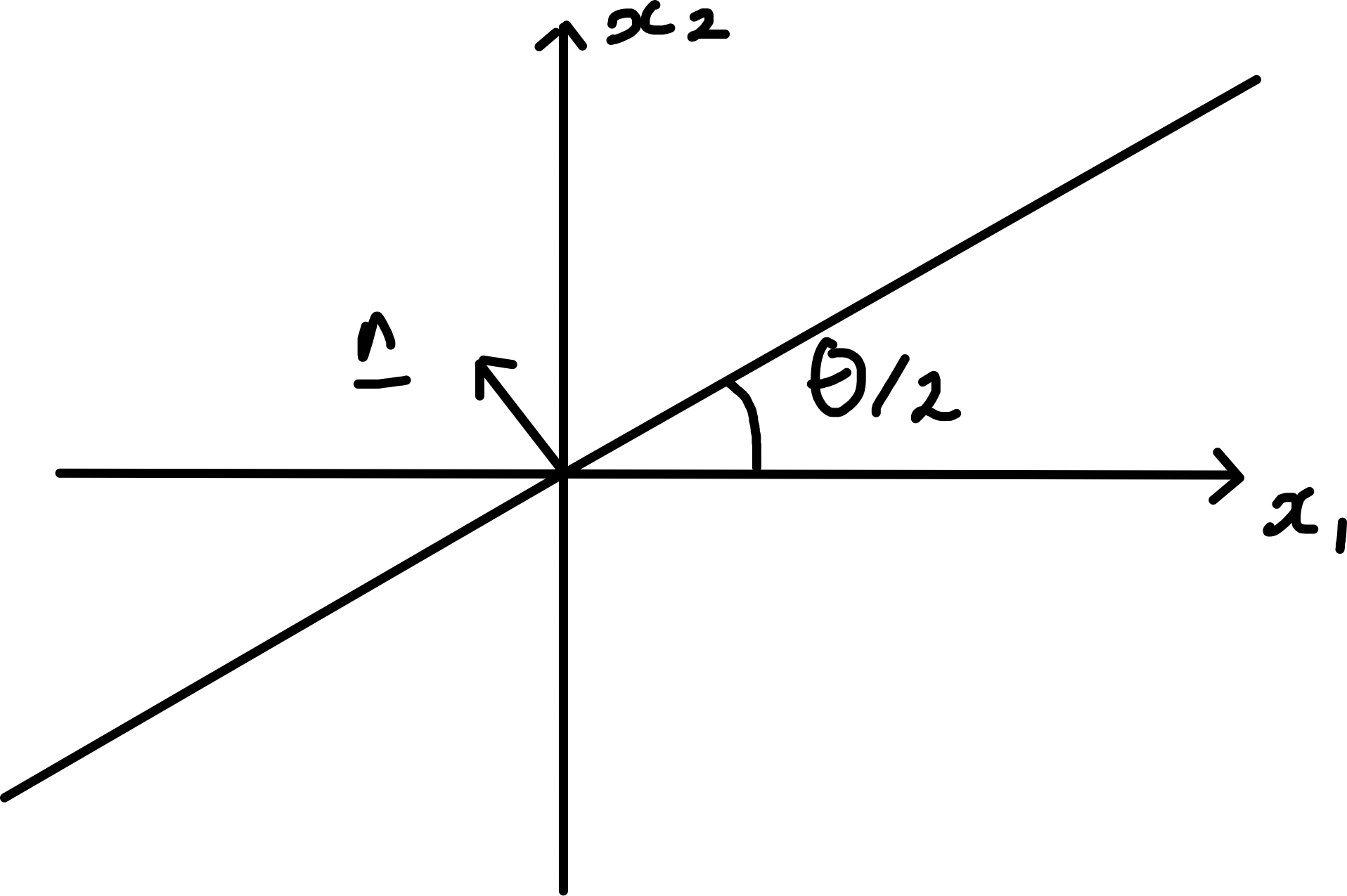
\[\begin{align*} H_{ij} &= \delta_{ij} - 2 n_i n_j \\ \text{and note for } \underline{n} &= \begin{pmatrix}n_1 \\n_2\end{pmatrix} = \begin{pmatrix} -\sin \frac{\theta}{2} \\ \cos \frac{\theta}{2}\end{pmatrix} \\ \text{we get } H &= \begin{pmatrix} 1 - 2 \sin^2 \frac{\theta}{2} & 2 \sin \frac{\theta}{2} \cos \frac{\theta}{2} \\ 2 \sin \frac{\theta}{2} \cos \frac{\theta}{2} & 1 - 2 \cos^2 \frac{\theta}{2} \end{pmatrix} \end{align*}\] agreeing with H above. This is reflection in a line in \(\mathbb{R}^2\) as shown
- How does \(M\) change areas in \(\mathbb{R}^2\) (in general)?
Consider unit square in \(\mathbb{R}^2\), mapped to parallelogram as shown, with signed area \([M \underline{e}_1, M \underline{e}_1]\) “scalar cross product”.
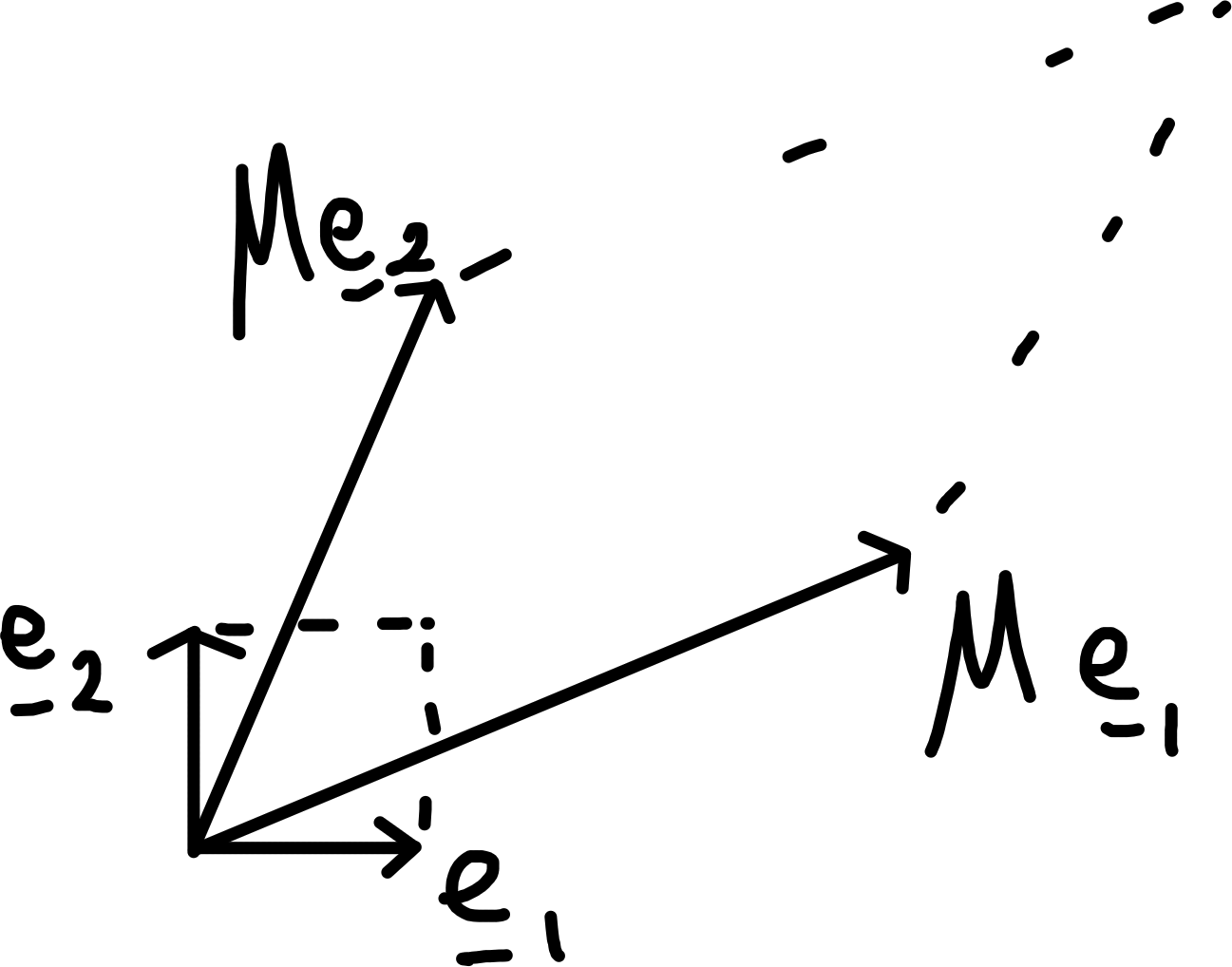
\[\begin{align*} \left[ \begin{pmatrix} M_{11} \\M_{21}\end{pmatrix}, \begin{pmatrix}M_{12} \\M_{22}\end{pmatrix} \right] &= M_{11} M_{22} - M_{12} M_{21} \\ &= \det M, \end{align*}\] the determinant of \(2 \times 2\) matrix.
This is the factor (with a sign) by which areas are scaled under \(M\).
Now compare with (i): \[\begin{align*} \det R = + 1,\ \det H = -1. \end{align*}\] In either case \(| \det M | = + 1\). Consider shear \(S = \begin{pmatrix}1 & \lambda \\0 & 1\end{pmatrix}\); this has \(\det S = + 1\) but it does not preserve lengths.
4.4 Matrices for Linear Maps in General
Consider a linear map
\[\begin{align*}
T : V \to W
\end{align*}\] between real or complex vector spaces of \(\dim n, m\) respectively and choose bases \(\{ \underline{e}_i \}\) with \(i = 1, \dots, n\) for \(V\) and \(\{ \underline{f}_a \}\) with \(a = 1, \dots, m\) for \(W\).
The matrix \(M\) for \(T\) wrt the bases in an \(m \times n\) array with entries \(M_{ai} \in \mathbb{R}\) or \(\mathbb{C}\).
It is defined by
\[\begin{align*}
T(\underline{e}_i) &= \sum_a \underline{f}_a M_{ai} \text{ note index positions}.
\end{align*}\]
This is chose to ensure that \(T(\underline{x}) = \underline{x}'\) where \(\underline{x} = \sum_i x_i \underline{e}_i\) and \(\underline{x}' = \sum_a x_a' \underline{f}_a\) iff \(x_a' = \sum_i M_{ai} x_i\).
\[\begin{align*}
\text{i.e. } \begin{pmatrix}x_1' \\ \vdots \\ x_m'\end{pmatrix} = \begin{pmatrix}
M_{11} & \dots & M_{1n} \\
\vdots & & \vdots \\
M_{m1} & \dots & M_{mn}
\end{pmatrix}
\begin{pmatrix}x_1 \\ \vdots \\ x_n\end{pmatrix}.
\end{align*}\]
Moral: given choice of bases \(\{ \underline{e}_i \}\) and \(\{ \underline{f}_a \}\)
\(V\) is identified with \(\mathbb{R}^n\) (or \(\mathbb{C}^n\))
\(W\) is identified with \(\mathbb{R}^m\) (or \(\mathbb{C}^m\))
\(T\) is identified with \(m \times n\) matrix \(M\).
Note: there are natural ways to combine linear maps.
If \(S : V \to W\) is also linear, then so is \(\alpha T + \beta S : V \to W\) defined by \((\alpha T + \beta S) (\underline{x}) = \alpha T(\underline{x}) + \beta S(\underline{x})\).
Or if \(S : U \to V\) is also linear, then so is \(T \circ S : U \to W\) (composition of maps).
4.5 Matrix Algebra
4.5.1 Linear Combinations
If \(M\) and \(N\) are \(m \times n\) matrices then \(\alpha M + \beta N\) is an \(m \times n\) matrix defined by \[\begin{align*} (\alpha M + \beta N)_{ai} &= \alpha M_{ai} + \beta N_{ai} \\ (a = 1, \dots, m&; i = 1, \dots, n) \end{align*}\] [If \(M, N\) represent linear maps \(T, S : V \to W\), then \(\alpha M + \beta N\) represents \(\alpha T + \beta S\), all w.r.t. same choice of bases].
4.5.2 Matrix multiplication
If \(A\) is an \(m \times n\) matrix, entries \(A_{ai} \in \mathbb{R}\) or \(\mathbb{C}\)
and \(B\) is an \(n \times p\) matrix, entries \(B_{ir}\) then \(AB\) is an \(m \times p\) matrix defined by \((AB)_{ar} = A_{ai} B_{ir}\) (\(\sum\) convention).
The product \(AB\) is not defined unless no. of cols of \(A =\) no. of rows of B.
\[\begin{align*}
a &= 1, \dots, m \\
i &= 1, \dots, n \\
r &= 1, \dots, p.
\end{align*}\]
Matrix multiplication corresponds to the composition of linear maps. \[\begin{align*} [(AB) \underline{x}]_a &= (AB)_{ar} x_r \text{ and compare} \\ [A(B \underline{x})]_a &= A_{ai}(B \underline{x})_i = A_{ai} (B_{ir} x_r) \\ &= (A_{ai} B_{ir}) x_r \end{align*}\]
Example 4.13 \[\begin{align*} A &= \begin{pmatrix}1 & 3 \\-5 & 0 \\2 & 1\end{pmatrix},\ B = \begin{pmatrix}1 & 0 & -1 \\2 & -1 & 3\end{pmatrix} \\ AB &= \begin{pmatrix} 7 & -3 & 8 \\ -5 & 0 & 5 \\ 4 & -1 & 1 \end{pmatrix} \\ BA &= \begin{pmatrix} -1 & 2 \\ 13 & 9 \end{pmatrix} \end{align*}\]
4.5.2.1 Helpful points of view
Regarding \(\underline{x} \in \mathbb{R}^n\) as a col vec or \(n \times 1\) matrix, definition on matrix multiplication a matrix or vector agree.
For product of \(\underbrace{A}_{m \times n} \underbrace{B}_{n \times p}\) have columns \(\underline{C}_r (B) \in \mathbb{R}^n\) and \(\underline{C}_r (AB) \in \mathbb{R}^m\) related by \(\underline{C}_r (AB) = A \underline{C}_r (B)\)
\[\begin{align*} AB &= \begin{pmatrix} & \vdots & \\ \longleftarrow & \underline{R}_a (A) & \longrightarrow \\ & \vdots & \end{pmatrix} \begin{pmatrix} & \big\uparrow & \\ \dots & \underline{C}_r(B) & \dots \\ & \big\downarrow & \end{pmatrix} \\ (AB)_{ar} &= [\underline{R}_a (A)]_i [\underline{C}_r (B)]_i \\ &= \underline{R}_a (A) \cdot \underline{C}_r (B) \text{ dot product in $\mathbb{R}^n$ for real matrices.} \end{align*}\]
4.5.2.2 Properties of matrix products
\[\begin{align*} (\lambda M + \mu N) P &= \lambda (MP) + \mu (NP) \\ P(\lambda M + \mu N) &= \lambda (PM) + \mu (PN) \\ (MN)P &= M (NP) \end{align*}\]
4.5.3 Matrix Inverses
Consider \(A\) \(m \times n\) matrix and \(B, C\) \(n \times m\) matrices, \(B\) is a left inverse for \(A\) if \[\begin{align*} BA = I_n; \end{align*}\] \(C\) is a right inverse for \(A\) if \[\begin{align*} AC = I_m. \end{align*}\]
If \(m = n\), \(A\) is square, one of these implies the other and \(B = C = A^{-1}\), the inverse. \[\begin{align*} A A^{-1} = A^{-1} A = I. \end{align*}\] Not every matrix has an inverse; if it does it is called invertible or non-singular.
Consider map \(\mathbb{R}^n \to \mathbb{R}^n\) given by real matrix \(M\).
If \(\underline{x}' = M \underline{x}\) and \(M^{-1}\) exists then \(\underline{x} = M^{-1} \underline{x}'\).
For \(n = 2\)
\[\begin{align*}
x_1' &= M_{11} x_1 + M_{12} x_2 \\
x_2' &= M_{21} x_1 + M_{22} x_2 \\
\implies M_{22} x_1' - M_{12} x_2' &= (\det M) x_1 \\
\text{and } - M_{21} x_1' + M_{11} x_2' &= (\det M) x_2
\end{align*}\]
So if \(\det M = M_{11} M_{22} - M_{12} M_{21} \neq 0\) then \(M^{-1} = \frac{1}{\det M} \begin{pmatrix} M_{22} & -M_{12} \\ -M_{21} & M_{11} \end{pmatrix}\).
Example 4.14 \[\begin{align*} R (\theta) &= \begin{pmatrix} \cos \theta & - \sin \theta \\ \sin \theta & \cos \theta \end{pmatrix} \\ R(\theta)^{-1} &= R (-\theta) \end{align*}\]
Example 4.15 Reflection. \[\begin{align*} H (\theta) &= \begin{pmatrix} \cos \theta & \sin \theta \\ - \sin \theta & \cos \theta \end{pmatrix} \\ H(\theta)^{-1} &= H (\theta) \end{align*}\]
Example 4.16 \[\begin{align*} S (\lambda) &= \begin{pmatrix} 1 & \lambda \\ 0 & 1 \end{pmatrix} \\ S(\lambda)^{-1} &= S (-\lambda) \end{align*}\]
4.5.4 Transpose and Hermitian Conjugate
4.5.4.1 Transpose
Definition 4.2 (Transpose) If \(M\) is an \(m \times n\) matrix, the transpose \(M^T\) is an \(n \times m\) matrix defined by \[\begin{align*} (M^T)_{ia} &= M_{ai} \ ``\text{exchange rows and columns"} \\ [a &= 1, \dots, m;\ i = 1, \dots, n] \end{align*}\]
4.5.4.1.1 Properties
\[\begin{align*} (\alpha A + \beta B)^T &= \alpha A^T + \beta B^T \ (A, B \ m \times n) \\ (AB)^T &= B^T A^T \\ \text{Check: } [(AB)^T]_{ra} &= (AB)_{ar} \\ &= A_{ai} B_{ir} \ \left(\sum \text{ convention} \right) \\ &= (A^T)_{ia} (B^T)_{ri} \\ &= (B^T)_{ri} (A^T)_{ia} \\ &= (B^T A^T)_{ra} \end{align*}\]
Note: \(\underline{x} = \begin{pmatrix}x_1 \\\vdots \\x_n\end{pmatrix}\) is a column vector or a \(n \times 1\) matrix.
\(\implies \underline{x}^T = \begin{pmatrix}x_1 & \dots & x_n\end{pmatrix}\) is a row vector or \(1 \times n\) matrix.
Inner product on \(\mathbb{R}^n\) is \(\underline{x} \cdot \underline{y} = \underline{x}^T \underline{y}\), a scalar or \(1 \times 1\) matrix, but \(\underline{y} \underline{x}^T = M\), a \(n \times n\) matrix with \(M_{ij} = y_i x_j\).
Definition 4.3 (Symmetric and Antisymmetric matrix) If \(M\) is square, \(n \times n\), then \(M\) is symmetric iff \(M^T = M\) or \(M_{ij} = M_{ji}\) and antisymmetric iff \(M^T = - M\) or \(M_{ij} = - M_{ji}\).
Any square matrix can be written as a sum of a symmetric and antisymmetric parts: \[\begin{align*} M = S + A \text{ where } S &= \frac{1}{2} (M + M^T) \\ \text{and } A &= \frac{1}{2} (M - M^T) \end{align*}\]
Example 4.17 If \(A\) is \(3 \times 3\) antisymmetric, then it can be rewritten in terms of vec \(\underline{a}\) \[\begin{align*} A &= \begin{pmatrix} 0 & a_3 & -a_2 \\ -a_3 & 0 & a_1 \\ a_2 & -a_1 & 0 \end{pmatrix} \\ A_{ij} &= \epsilon_{ijk} a_k \text{ and } a_k = \frac{1}{2} \epsilon_{kij} A_{ij} \\ \text{Then } (A \underline{x})_i &= A_{ij} x_j = \epsilon_{ijk} a_k x_j \\ &= (\underline{x} \wedge \underline{a})_i \end{align*}\]
4.5.4.2 Hermitian Conjugate
Definition 4.4 (Hermitian Conjugate) If \(M\) is a \(m \times n\) matrix the hermitian conjugate \(M^\dagger\) is defined by \((M^\dagger)_{ia} = \overline{M}_{ai}\) or \(M^\dagger = \overline{M}^T = \overline{M^T}\)
4.5.4.2.1 Properties
\[\begin{align*} (\alpha A + \beta B)^\dagger &= \overline{\alpha} A^\dagger + \overline{\beta} B^\dagger \\ (AB)^\dagger &= B^\dagger A^\dagger \end{align*}\]
Note: \(\underline{z} = \begin{pmatrix}x_1 \\\vdots \\x_n\end{pmatrix}\) is a column vector or a \(n \times 1\) matrix.
\(\implies \underline{z}^\dagger = \begin{pmatrix}x_1 & \dots & x_n\end{pmatrix}\) is a row vector or \(1 \times n\) matrix.
Inner product on \(\mathbb{C}^n\) is \((\underline{z}, \underline{w}) = \underline{z}^\dagger \underline{w}\), a scalar or \(1 \times 1\) matrix.
Definition 4.5 (Hermitian and Anti-Hermitian matrix) If \(M\) is square \(n \times n\) then \(M\) is hermitian if \(M^\dagger = M\) or \(M_{ij} = \overline{M}_{ji}\) and anti-hermitian if \(M^\dagger = - M\) or \(M_{ij} = - \overline{M}_{ji}\).
4.5.4.3 Trace
Definition 4.6 (Trace) For any square \(n \times n\) matrix \(M\), the trace is defined by \[\begin{align*} \operatorname{tr} (M) = M_{ii} \text{ (the sum of diagonal entries.)} \end{align*}\]
4.5.4.3.1 Properties
\[\begin{align*} \operatorname{tr} (\alpha M + \beta N) &= \alpha \operatorname{tr} (M) + \beta \operatorname{tr}(N) \\ \operatorname{tr} (MN) &= \operatorname{tr} (NM) \\ [ \text{check : } (MN)_{ii} &= M_{ia} N_{ai} \\ &= N_{ai} M_{ia} \\ &= (NM)_{aa} ] \\ \operatorname{tr} (M) &= \operatorname{tr} (M^T) \\ \operatorname{tr} (I_n) &= n \\ [I_{ij} = \delta_{ij} \text{ and } I_{ii} = \delta_{ii} = n] \end{align*}\]
We previously decomposed \(M = S + A\) (symmetric/ anti-symmetric parts).
Let \(T = S - \frac{1}{n} (\operatorname{tr} (S)) I\) or \(T_{ij} = S_{ij} - \frac{1}{n} \operatorname{tr} (S) \delta_{ij}\), then \(T_{ii} = \operatorname{tr}(T) = 0\); and note \(\operatorname{tr}(M) = \operatorname{tr}(S)\) and \(\operatorname{tr}(A) = 0\)7.
So \(M = \underset{\text{symm and traceless}}{T} + \underset{\text{antisymm part}}{A} + \underset{\text{pure trace}}{\frac{1}{n} \operatorname{tr}(M) I}\)
Example 4.18 \[\begin{align*} M &= \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 1 & 2 & 3 \end{pmatrix} \\ S &= \begin{pmatrix} 1 & 3 & 2 \\ 3 & 4 & 5 \\ 2 & 4 & 3 \end{pmatrix} \text{ and } A = \begin{pmatrix} 0 & -1 & 1 \\ 1 & 0 & 2 \\ -1 & -2 & 0 \end{pmatrix} \\ \operatorname{tr}(S) &= \operatorname{tr}(M) = 9 \\ T &= \begin{pmatrix} -2 & 3 & 2 \\ 3 & 2 & 4 \\ 2 & 4 & 0 \end{pmatrix} \\ M &= T + A + 3I \\ \text{Furthermore } A \underline{x} &= \underline{x} \wedge \underline{a} \text{ where } \underline{a} = \begin{pmatrix}2 & -1 & -1\end{pmatrix}. \end{align*}\]
4.6 Orthogonal and Unitary Matrices
Definition 4.7 (Orthogonal matrix) A real \(n \times n\) matrix is orthogonal iff \[\begin{align*} u^T u &= u u^T = I \\ \text{i.e. } u^T &= u^{-1}. \end{align*}\]
These conditions can be written \[\begin{align*} (u^T u)_{ij} &= (u u^T)_{ij} = I_{ij} \\ \underbrace{u_{ki} u_{kj}}_\text{cols of $u$ are othornormal} &= \underbrace{u_{ik} u_{jk}}_\text{rows of $u$ are othornormal} = \delta_{ij} \end{align*}\] [recall \([\underline{C}_i (u)]_k = u_{ki} = [R_k(u)]_i\)]
\[\begin{align*} \underbrace{\begin{pmatrix} & \vdots & \\ \longleftarrow & \underline{C}_i & \longrightarrow \\ & \vdots & \end{pmatrix}}_{u^T} \underbrace{\begin{pmatrix} & \big\uparrow & \\ \dots & \underline{C}_j & \dots \\ & \big\downarrow & \end{pmatrix}}_{u} &= I \\ \underline{C}_i \cdot \underline{C}_j = \delta_{ij} \end{align*}\]
Equivalent definition: u is orthogonal iff it preserves the inner product on \(\mathbb{R}^n\). \[\begin{align*} (u \underline{x}) \cdot (u \underline{y}) &= \underline{x} \cdot \underline{y} \quad \forall \; x, y \in \mathbb{R}^n \end{align*}\] To check equivalence, write this as \[\begin{align*} (u \underline{x}) \cdot (u \underline{y}) &= x^T (u^T u) y \\ &= x^T y \iff u^T u = I \\ &= \underline{x} \cdot \underline{y} \quad \forall \; x, y \in \mathbb{R}^n \end{align*}\] Note, since \(\underline{C}_i = u \underline{e}_i\), columns being orthonormal \(\iff (u \underline{e}_i) \cdot (u \underline{e}_j) = \underline{e}_i \cdot \underline{e}_j = \delta_{ij}\).
Example 4.19 In \(\mathbb{R}^2\) we found all orthogonal matrices Isometries, area and determinants in \(\mathbb{R}^2\):
rotations \(R(\theta) = \begin{pmatrix} \cos \theta & - \sin \theta \\ \sin \theta & \cos \theta \end{pmatrix}\) and reflections \(H(\theta) = \begin{pmatrix} \cos \theta & \sin \theta \\\sin \theta & - \cos \theta \end{pmatrix}\).
Clearly \(R(\theta)^T = R(-\theta) = R(\theta)^{-1}\).
\[\begin{align*}
R(\theta)^T &= R(-\theta) = R(\theta)^{-1} \\
H(\theta)^T &= H(\theta) = H(\theta)^{-1}.
\end{align*}\]
In \(\mathbb{R}^3\) we found the matrix \(R(\theta)\) for rotation through \(\theta\) about axis \(\underline{n}\), 4.12.
\[\begin{align*}
R(\theta)^T &= R(-\theta) \\
\text{Since } R(\theta)_{ij} &= R(-\theta)_{ji}
\end{align*}\]
and can check explicitly
\[\begin{align*}
R(\theta)^T R(\theta) &= R(-\theta)R(\theta) = I \\
\text{or } R(\theta)_{ki} R(\theta)_{kj} &= \delta_{ij}
\end{align*}\]
Definition 4.8 (Unitary matrix) A complex \(n \times n\) matrix \(u\) is unitary iff \[\begin{align*} u^\dagger u &= u u^\dagger = I \\ \text{i.e. } u^\dagger &= u^{-1}. \end{align*}\]
Equivalent definition: u is unitary iff it preserves the inner product on \(\mathbb{C}^n\). \[\begin{align*} (u \underline{z}, u \underline{w}) &= (\underline{z}, \underline{w}) \quad \forall \; z, w \in \mathbb{C}^n \end{align*}\]
To check equivalence, write this as \[\begin{align*} (u \underline{z})^\dagger (u \underline{w}) &= \underline{z}^\dagger (u^\dagger u) \underline{w} \\ &= \underline{z}^\dagger \underline{w} \iff u^\dagger u = I \\ &= (\underline{z}, \underline{w}) \quad \forall \; \underline{z}, \underline{w} \end{align*}\] Note, since \(\underline{C}_i = u \underline{e}_i\), columns being orthonormal \(\iff (u \underline{e}_i) \cdot (u \underline{e}_j) = \underline{e}_i \cdot \underline{e}_j = \delta_{ij}\).